https://docs.px4.io/master/en/
Intro
PX4 is a core part of a broader drone platform that includes the QGroundControl ground station, Pixhawk hardware, and MAVSDK for integration with companion computers, cameras and other hardware using the MAVLink protocol. PX4 is supported by the Dronecode Project.
- QGroundControl 地面控制站
- Flight Controller Board 飞控板
- Sensors
- Motors 使用无刷电机,飞行控制器使用电子调速器(电调)驱动
- Battery Power 使用 LiPo 电池供电
- Radio Controller 手动遥控器
- Safety Switch 防炸机
- Offboard/Companion Computer
飞行
这部分内容来自于http://docs.px4.io/master/en/flying/first_flight_guidelines.html 包含了飞行中的各种注意事项。
Flying 101 - 使用遥控器进行飞行
Arm the Vehicle 解锁飞机
在 PX4 的飞控中,通常情况下,为了保证安全,飞机都处在 disarm 的状态下,此时各个驱动器(电机)都是未通电的,也就是说,这时飞机是不能直接起飞的。
将飞机解锁有如下几种办法
- 将油门摇杆(左摇杆)推至右下并摁住不动
- 使用QGC地面站进行解锁:点击 Arm 并在屏幕上拖动解锁按钮
只有飞机进行传感器标定和遥控器标定后才能解锁,在 Nora 飞控中此时闪蓝灯
如果解锁 Arm 飞机后,飞控很长时间没有收到起飞命令,飞机会重新锁定
Take Off 起飞
起飞可以使用自动起飞命令自动起飞,也可以直接推高左摇杆(油门)起飞
Landing 降落
降落有如下方法
将油门摇杆推至左下并摁住不懂
使用QGC地面站进行降落
使用遥控器切换到降落模式,一般是5通道(即油门旁边的按钮,有的遥控器上是LT按钮)
如果降落中发现油门调低后没有停桨,说明降落控制器的参数没有调对
调节降落控制器的参数
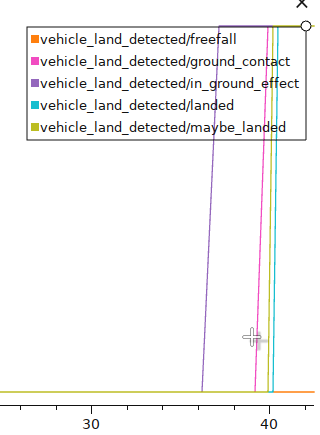
降落控制器的原理
降落控制器有三个状态,只有经历这三个状态后才能降落
- 地面接触状态:如果同时满足如下三个状态且持续0.35s,飞机则认为达到这一状态
- 无水平运动
- 无竖直运动
- 油门低于 MPC_THR_MIN + (MPC_THR_HOVER - MPC_THR_MIN) * 0.3 或者 速度是着陆速度的 0.9 倍但是此时没有纵向运动
- 可能着陆状态:如果以下条件满足且持续0.25秒,飞控进入该状态
- 已经达到地面接触状态
- 飞机目前没有旋转
- 油门很低,低于 MPC_THR_MIN + (MPC_THR_HOVER - MPC_THR_MIN) * 0.1
- 着陆状态:如果可能着陆态所有条件满足并持续0.30s,则飞控进入着陆态
- 地面接触状态:如果同时满足如下三个状态且持续0.35s,飞机则认为达到这一状态
MPC_THR_MIN 最小油门 不建议设为0
MPC_THR_HOVER 悬停油门,一般在 0.1 ~ 0.8 之间,默认 0.5 需要根据飞机的配重进行调节
飞行模式
Position Mode
右摇杆控制各个方向的速度,左摇杆控制高度、悬停和Yaw角,并自动抵抗风的扰动(
不动摇杆时飞机位置姿态不改变
Altitide mode
定高模式,竖直方向固定不变,水平方向可能因为风向而改变
Stabilized Mode
(只有)位置不固定,水平和竖直方向位置都有可能改变,松开摇杆时飞机会平飞
该模式不容易翻倒
基本装配
参考配置
DJI FlameWheel 450 + CUAV V5 nano Build | PX4 User Guide
只是换了新型号的飞控 CUAV V5 nano ⇒ CUAV V7 nora
Install QGroundControl (QGC) 地面站
available on AppStore and Google Play
linux 也可以下载,为了方便起见还是使用移动端版本
安装飞控
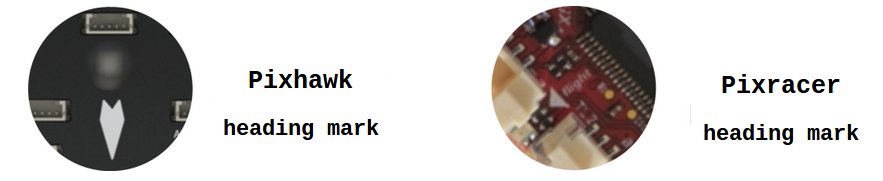
箭头朝向飞机前方,箭头这面朝上
隔震
下面贴3M隔震片
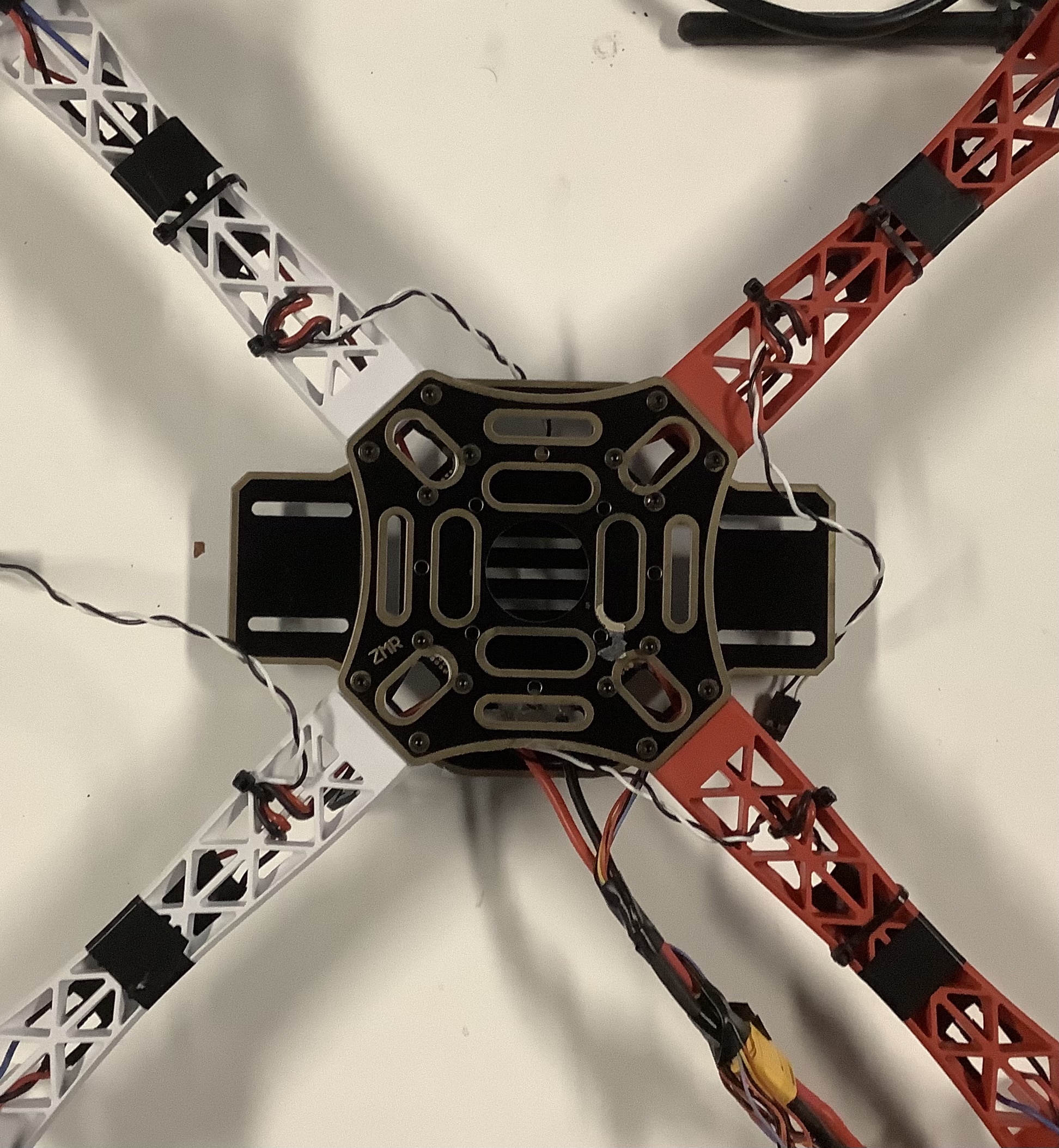
搭机架
这部分有大量的拧螺丝的工作,
将机架底板、顶板上一共24个螺钉拧好就行
白色的两个作为机头,红色的两个作为机尾(好看就行)
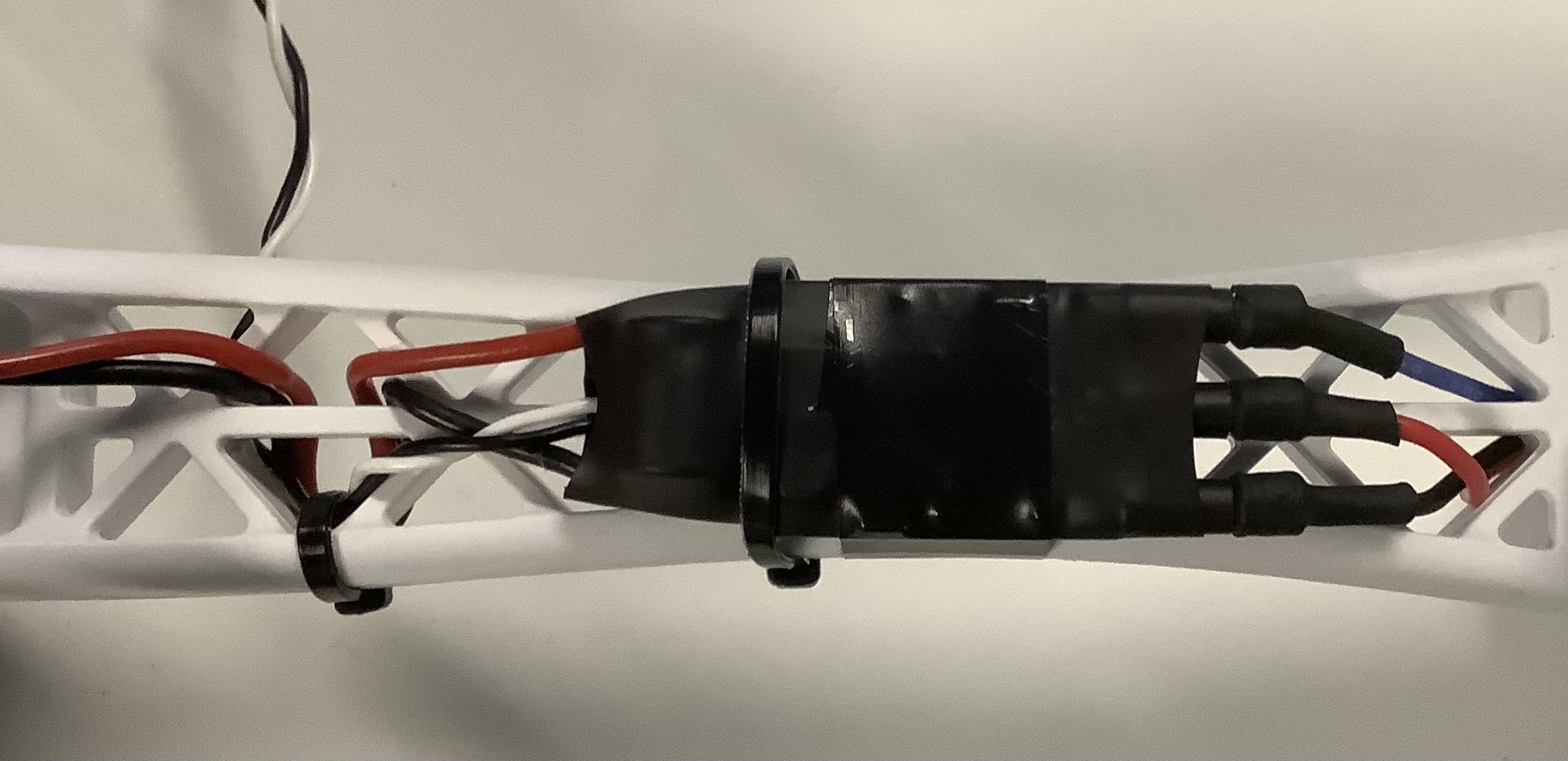
焊接电调
我们使用的是HOBBYWING的XROTOR系列无刷直流电调
电机端有红蓝黑三个线,使用3.5mm香蕉头母头连接电机;电源端有红黑两线;信号线为白黑双线,白色为信号线,接飞控S引脚,黑色为地线,接飞控地线
将四个电调的电源线焊接在底板上,把电调绑到机臂中央,然后把信号线引出来接飞控
左←接底板和飞控芯片;右→接电机
安装电机
我们选用的是 AIR2216 KV880 型号的直流无刷电机
这款电机使用3.5mm香蕉头连接电调,如果接错线比较容易拆卸和重新连接
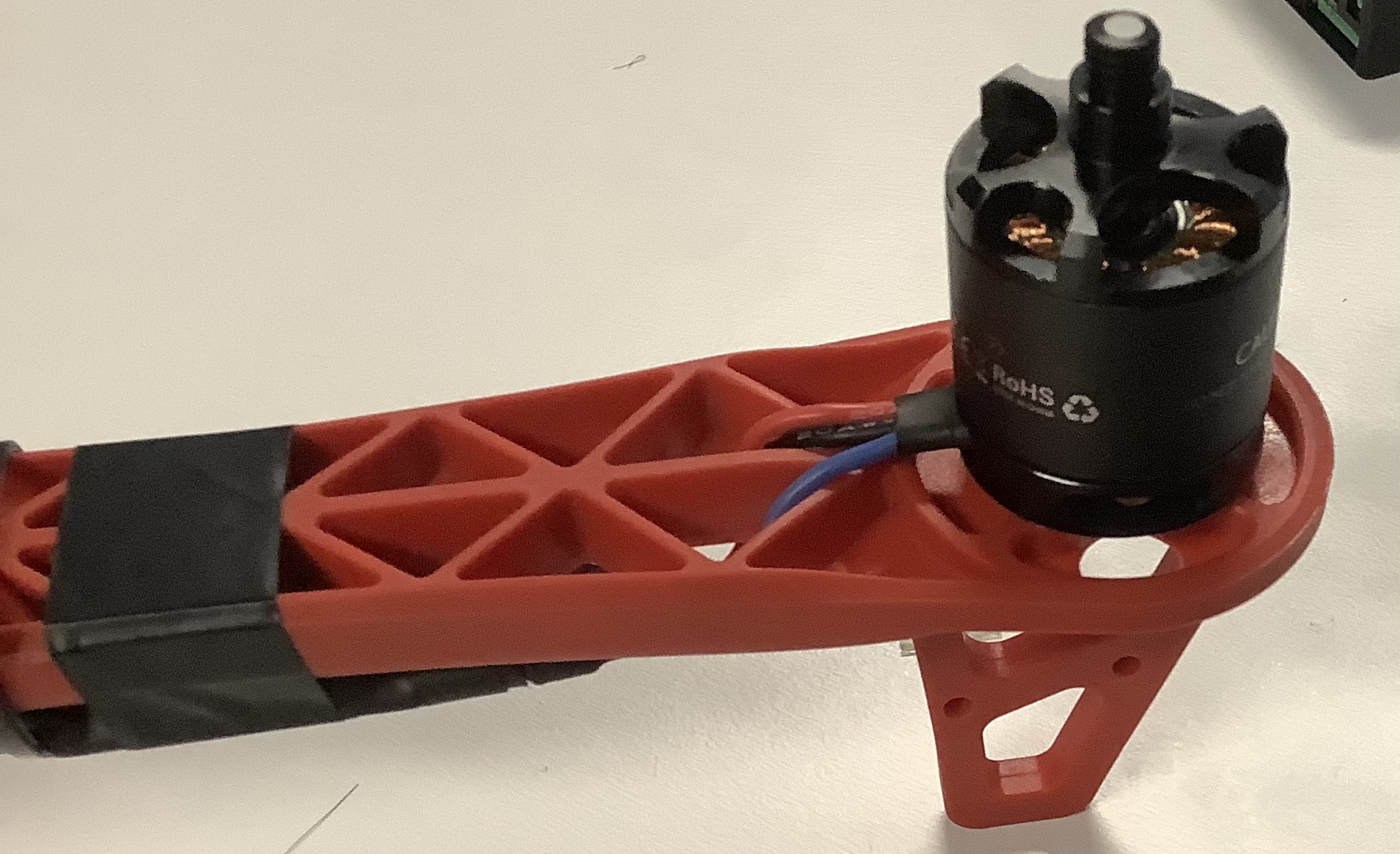

电机的插线
DJI 是从右前开始逆时针 1 - 2 - 3 - 4
PX4 的电机顺序是从右前开始 1 - 3 - 2 - 4
参数设置
调参
角速度控制模式调节器角速度环的 PID
查看 sd log ,使用 QGC 里面对应的工具进行可视化
看 accurate_output 的跟踪曲线
希望4个输出通道的输出曲线毛刺不要太大(高频振动不要太强)
角度控制模式调节P
由小向大调节,调到临振情况乘 0.8
理想情形
- 跟手
- 不迟钝
- 良好的机动性能
备忘
- 大鑫说要插上线标定传感器
- 装了GPS之后再校准一遍磁罗盘