This is a test post.
Table of Content
Intro
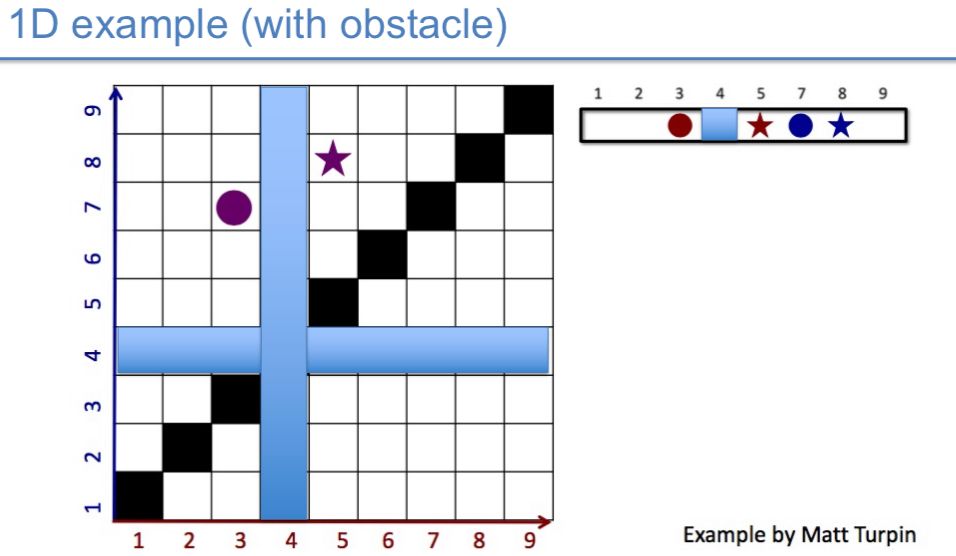
Consider 2d grid path finding problem
A*
- Multi-agent A*: plan in Joint configuration space of all robots
- Advantage: optimal
- Disadvantage: high dimensionality
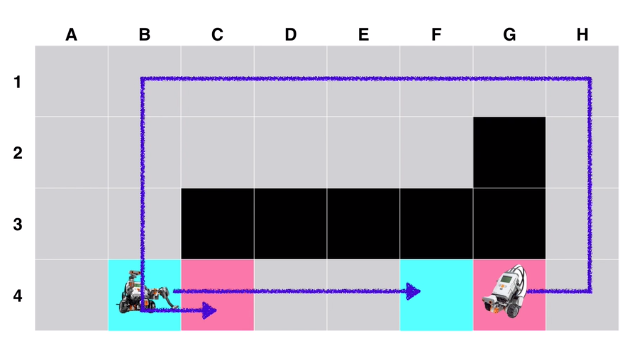
Cooperative A* (CA*)
Each robot plans sequentially and reserves the cell it’s going to use
Decouple cooperative path finding problem into a series of single agent searches
Use reservation table as shared knowledge: reservation table is a sparse data structure marking off spatio-temporal regions.
Algorithm
- execute A* for one agent
- mark off planned trajectory in reservation table (whole trajectory + duration)
- execute A* for other agents
Disadvantages
- Suboptimal
- incomplete
- small scale (may fail when dealing with many agents)
- runtime slow
- performance relies on the ordering of the robots
Extension
- Hierarchical CA*: use a better heuristic than Manhattan distance
- Windowed HCA*: plan with time windows and interleave planning and execution
A* + Operator Decomposition (OD)
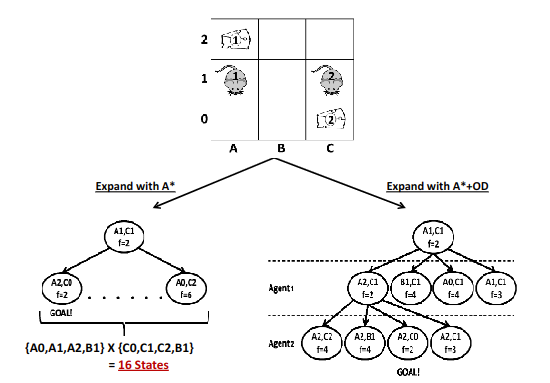
OD: reduce the search-space by allowing one agent can move at a time.
- reduce the dimensionality but increase the depth of search tree
A* + Independence Detection (ID)
A*: exponential in the number of agents, may not able to find feasible solution
ID: reduce the search-space by grouping agents together (travel groups) which do not have conflicts between each other
可以组内撞不可以组间撞,目的是将大问题分解成很多小问题。
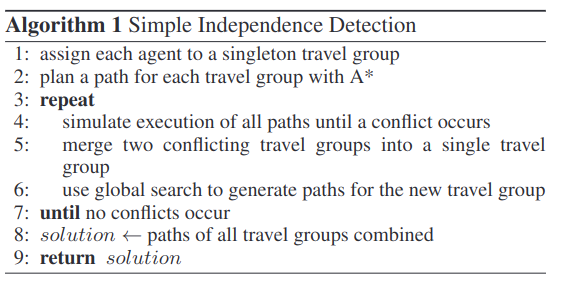
- Single group? will be marked as
- How to plan after grouping?
ID 只管分组不管搜图
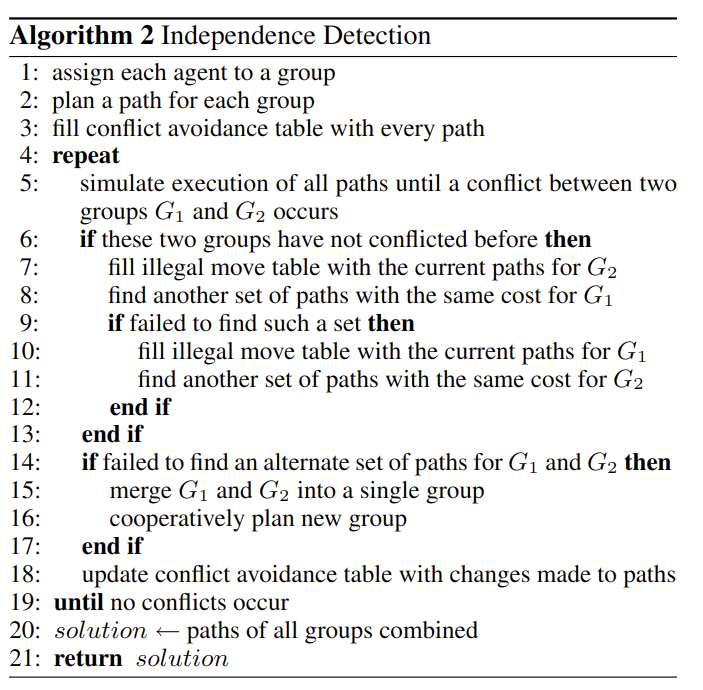
- refinement 1: illegal move table (similar to reservation table in CA*)
- refinement 2: conflict avoidance table 存储尚未分组的所有移动,以避免将来改组 (algorithm should choose path with fewest conflict avoidance table violations)
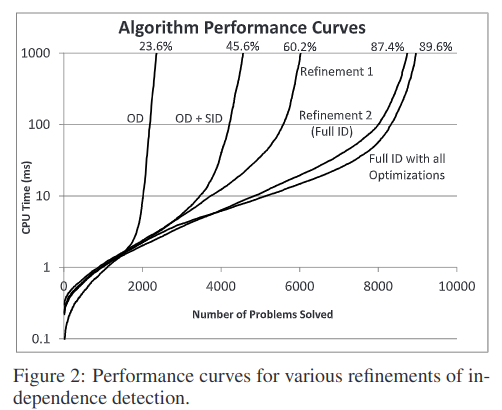
10000 problems with a random number of agents between 2 and 60.
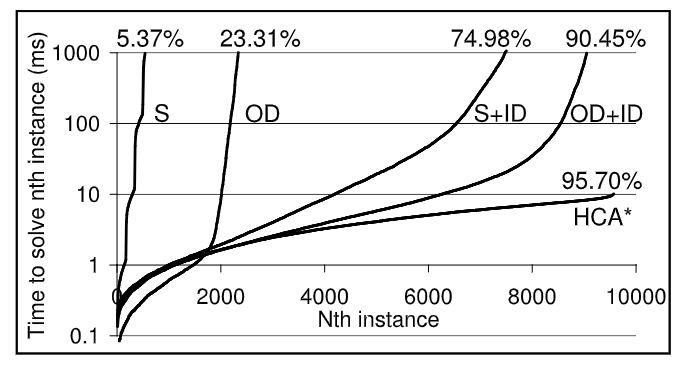
S: standard algorithm (A* baseline)
M*
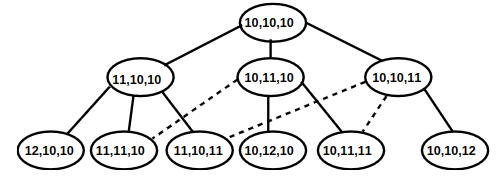
Increasing Cost Tree Search (ICTS)
- Two-level approach
- Top level: tree search, find the optimal set of path costs; Init (root) : best path for each agent
- Low level: single-agent path that has the same cost as the top level solution (terminates when non-conflicting solution is found)
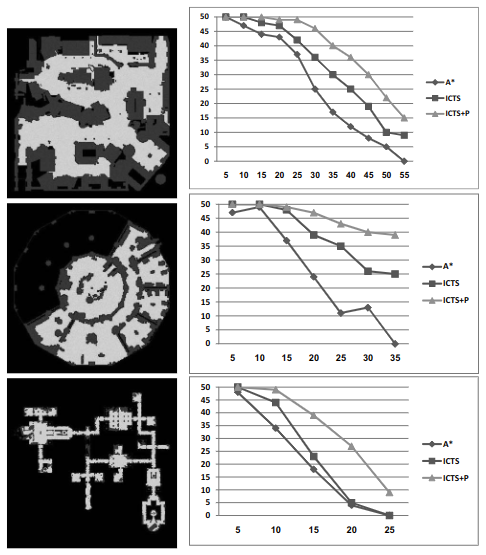
Advantage
- performs well when there are many chunks of open area;
Disadvantage:
- performs bad when environment is dense;
- exponential number of paths of cost $C_i$ for low level search
Computation time
$k$ number of agents; $k^{‘}$ average effective number of agents (number of agents in the largest independent subgroup found by ID)
A* : A* + OD + ID
ICTS + Pairwise pruning:
- avoid low-level search by considering subproblems of paris of agents
- First solve 2-agent search in MDD. If no solution found, this ICTS node has no solution.
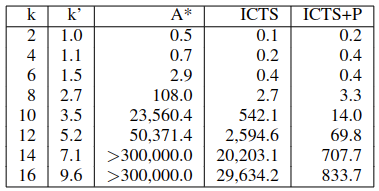
time limit 5 min
[Improvement] Low level results (paths) can be stored in Multi-Valued Decision Diagrams (MDD) , efficient for storing exponentially growing number of paths in linear space
$f: P_1 \times P_2 \times P_3 \times \cdots \times P_k \rightarrow P$
Suboptimal ICTS
- Increase cost of all agents (ICTS only increase a single agent’s cost)
- Makespan: maximum (optimal single-agent path cost) of all agents 用最大完成时间去初始化
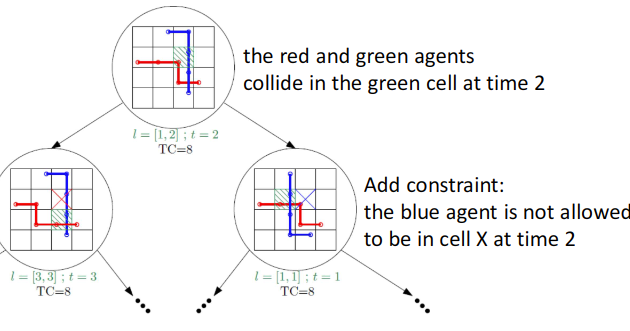
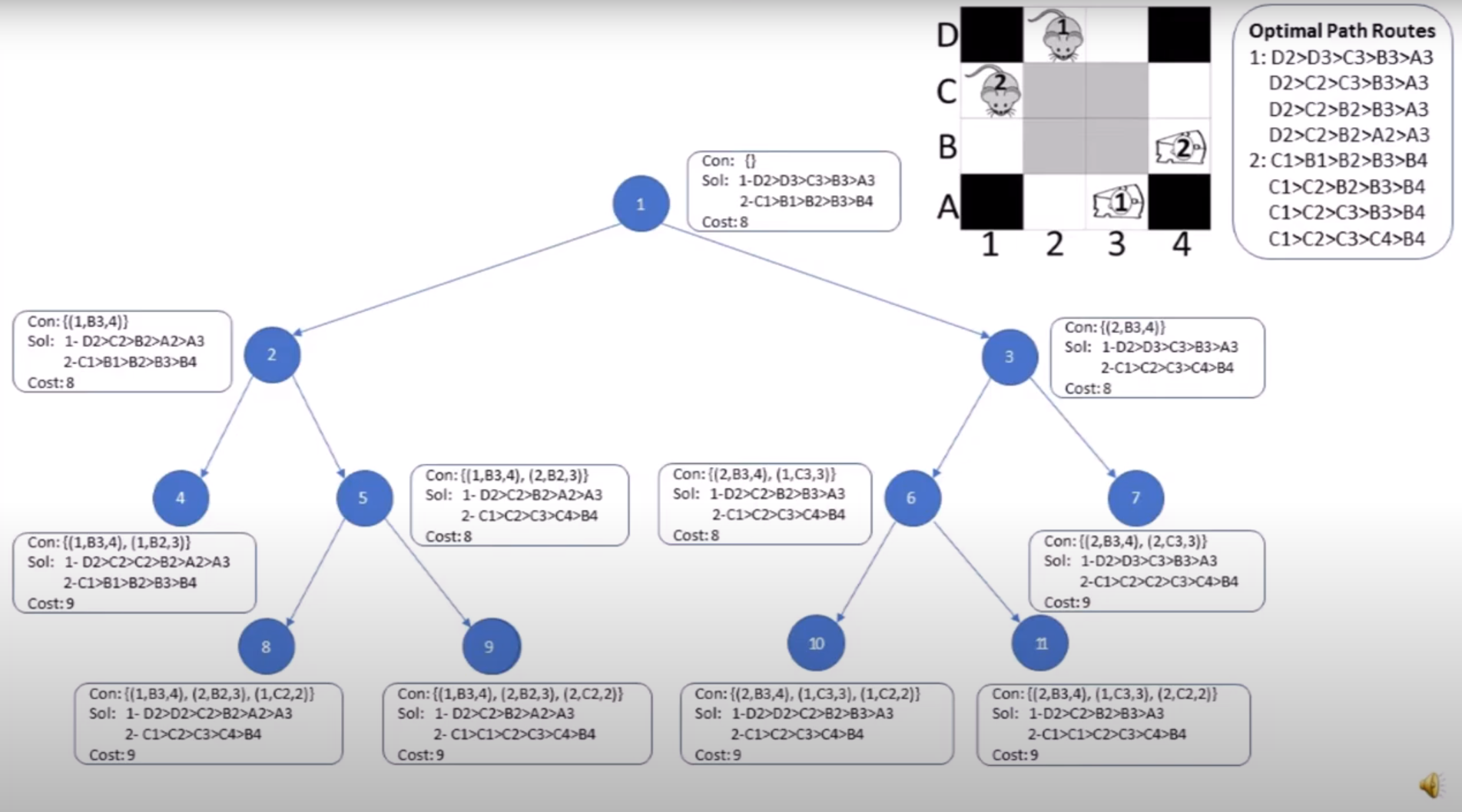
Conflict-based Search (CBS)
Two level algorithm
- Low level: optimal A* solution
- High level: search for a set of constraints to ensure optimal on a tree
Comparison
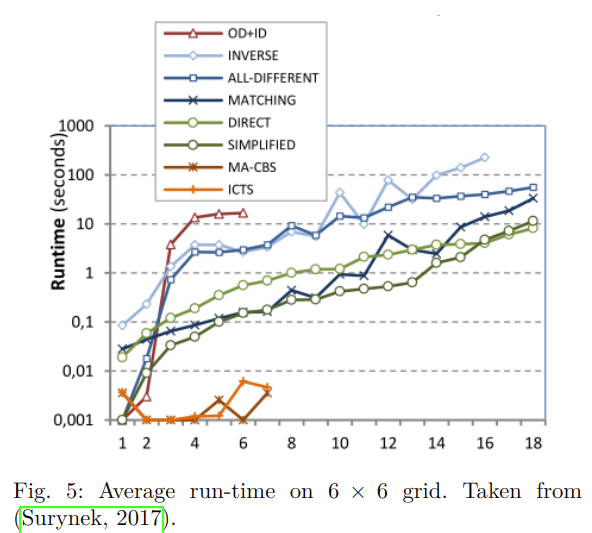
OD+ID; MA-CBS; ICTS; 5-different variant of SAT
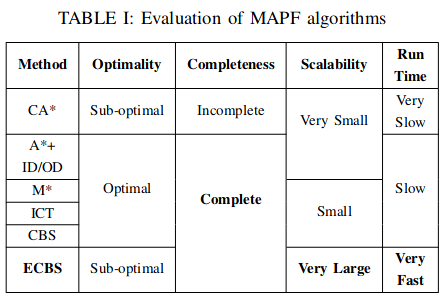
Different Multi Agent Path Finding (images/MAPF) algorithms
| Algorithm | Optimal | Setting | Completeness | Coupled/Decoupled | Runtime |
|---|---|---|---|---|---|
| CA* | No | Centralized | Incomplete | Decoupled | Very Slow |
| A* + ID/OD | Yes | Centralized | Complete | Sub-dimensional expansion | Slow |
| CBS | Yes | Centralized | Complete | Coupled | Faster |
| ICTS | Yes | Centralized | Complete | Coupled | Faster |
complete: guarantee to either find a path or to determine no solution.